robot end effector pdf
However data-driven forward kinematic self-models must know in advance what aspects of the robot need to be modeled such as the tilt angle of the robot the position of end effectors the velocity of motor joints the mirror image of animatronic faces or the contact locations as well as joint configurations of robot grippers The restricted predictive scope of. Or what joint torques or end-effector forces would have been the cause.
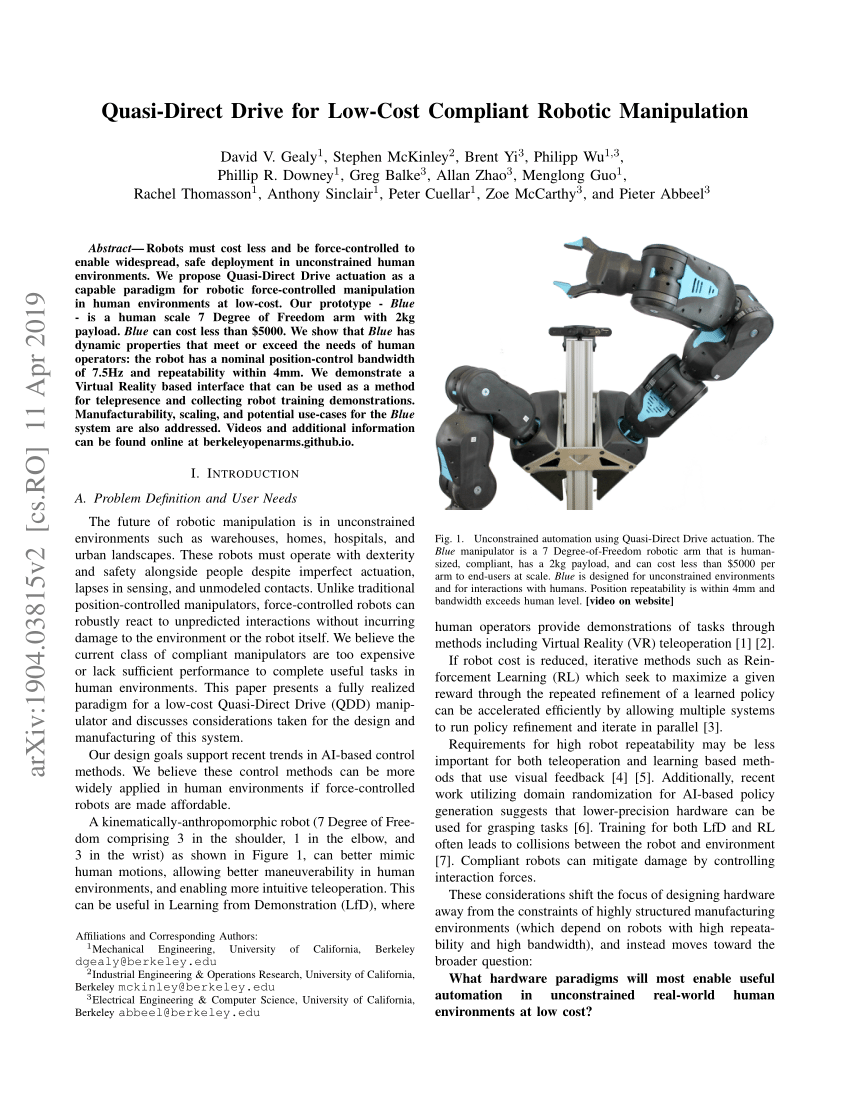
Pdf Quasi Direct Drive For Low Cost Compliant Robotic Manipulation
An industrial robot is a robot system used for manufacturingIndustrial robots are automated programmable and capable of movement on three or more axes.

. The classical method to find the position of an end effector is by solving the inverse kinematics. Here is a resolved-rate motion control example. A surgical robot is now more a mechatronic tool than an IT information technology tool.
A highly fast and accurate method with a Single Shot MultiBox Detector is used herein to detect the position of. Industrial robot system integration Stakeholders Integrator Installer and also the User but only if when the User acts as the designer integrator or modifier. Zbigniew Nawrat in Control Systems Design of Bio-Robotics and Bio-mechatronics with Advanced Applications 2020.
M number of end-effector configuration parameters m0 number of operational space coordinates minimal number of end-effector configuration parameters machine precision. Therefore to place the end effector in the right position at the right time is the most challenging job for an industrial robot. Cobot applications contrast with traditional industrial robot applications in which robots are isolated from human contact.
All accomplished with high. In both situations the opposing-cup effector on INSITE Packaging Automations case erector takes care of business. No end-effector Stakeholder Robot Manufacturer Equivalent to Clause 4 ONLY of 1999 R1506.
Generally massive numerical calculations need to be solved to get the answer for the position of the end effector. Robotic pick and pass Smart use of robotics on INSITEs auto case erectors enables us to get rid of many of the parts and. 是的matlab代码使用php创建pdf发票 附加信息 在该文件中您将找到一个示例该示例说明了如何使用php动态创建pdf文档为此在php脚本中定义了相应html代码该代码可保存pdf的内容然后将其与库一起转换为pdf文档这意味着您无需学习任何复杂的命令即可创建pdf文档简单html代码就足够了.
Rossums Universal Robots which was published in 1920. A cobot or collaborative robot is a robot intended for direct human robot interaction within a shared space or where humans and robots are in close proximity. The underlying physical principle is that a vibrating object tends to continue vibrating in the same plane even.
The word robotics was derived from the word robot which was introduced to the public by Czech writer Karel Čapek in his play RUR. We can also plot the trajectory in the Swift simulator a browser-based 3d-simulation environment built to work with the Toolbox robot. Select the IO signal type and select the IO port number.
Robot dynamics and simulation Allison Okamura Stanford University. A robot can be guided by an external control device or the control may be embedded within. Q We can also experiment with velocity controllers in Swift.
End Effector IO Testing 753 End Effector IO Testing To test the operation status of the connected end effector follow the procedure below. Connect the end effector port to the robot flange or control box. These are mounted on the end of the 3-dof translational robot arms to form serial robots with translational and rotational capability.
0 The growing importance of lidar technology. In robotics the workspace of a robot manipulator is often defined as the set of points that can be reached by its end-effector citation needed or in other words it is the space in which the robot works and it can be either a 3D space or a 2D surface. By helping to protect against premature wear this feature can help to prolong the robots service life minimizing disruption caused by downtime and unscheduled repairs.
Foundry Plus 2 offers stainless steel on end-effector to prevent rusting. Doosan Robotics User Manual v19. The Delta Robot has 4-degrees-of-freedom dof 3-dof for XYZ translation plus a fourth inner leg to control a single rotational freedom at the end-effector platform about the axis perpendicular to the platform.
Restricted by limiting devices that establish limits which will not be exceeded. However the challenges of appropriate decision-making flexibility and precision especially in the absence of professional staff in the conditions of. Industrial Robot - Volume 1 Issue 1 to Volume 49 Issue 5 Industrial Robot available volumes and issues.
Blue arrows show the joint axes and the coloured frame shows the end-effector pose. PDF 26 MB Downloads. Restricted space Portion of the maximum space.
Equations of motion describe the relationship between forcestorques and motion in joint space or workspace variables two possible goals. Refers to the portion of the restricted space to which a robot is restricted by software motion limits. Mobile or unified workspace.
Given motion variables eg. Cobot safety may rely on lightweight construction materials rounded edges and inherent. In practice no state-of-the-art robotic manipulation system to date that I know of uses rigorous control theory to design even the low-level feedback that determines when a robot makes and breaks contact with the objects it is manipulating.
PDF On Jan 1 1989 Miomir Vukobratović and others published Introduction to Robotics Find read and cite all the research you need on ResearchGate. Note I write primary above because the 3 translational joints also cause rotations and also the 3 wrist joints can cause translations of the tool. Robot arm and its controller ONLY.
The maximum distance that the robot end-effector and workpiece can travel after the software motion limits are set defines the boundaries of the motion space of the robot. The remainder of this document will focus only on the 3. However mechanization and robots for growing fruits have not been advanced.
The word robot comes from the Slavic word robota which means workjobThe play begins in a factory that makes artificial people called robots creatures who can be. Typical applications of robots include welding painting assembly disassembly pick and place for printed circuit boards packaging and labeling palletizing product inspection and testing. Tap the Confirm button.
This study aims to design a controller which can improve the end-effector low-frequency chattering resulting from the measurement noise and the time delay in the on. Quoted from the RIA Committee Draft Motion space. Robot end-effector position and.
A robot is a machineespecially one programmable by a computercapable of carrying out a complex series of actions automatically. Automation and labor saving in agriculture have been required recently. Robots may be constructed to evoke human form but most robots are task-performing machines designed with an emphasis on stark functionality rather.
Robot Robot arm robot control does NOT include end-effector or part Robot System Robot end-effector and workpiece Maximum space Space within which a robot system CAN move. Motion of the robot end-effector. This study proposes a method of detecting fruits and automated harvesting using a robot arm.
A vibrating structure gyroscope defined by the IEEE as a Coriolis vibratory gyroscope CVG is a gyroscope that uses a vibrating structure to determine the rate of rotation. The course Robot Dynamics provides an overview on how to model robotic sys-tems and gives a first insight in how to use these models in order to control the sys-. A vibrating structure gyroscope functions much like the halteres of flies insects in the order Diptera.
If the robot wrist. Product manual IRB 1300 English - pdf - Manual Product specification.

Robotics End Of Arm Tooling Baumer International

Products For Robotics Smc Europe

Pin On Entersan
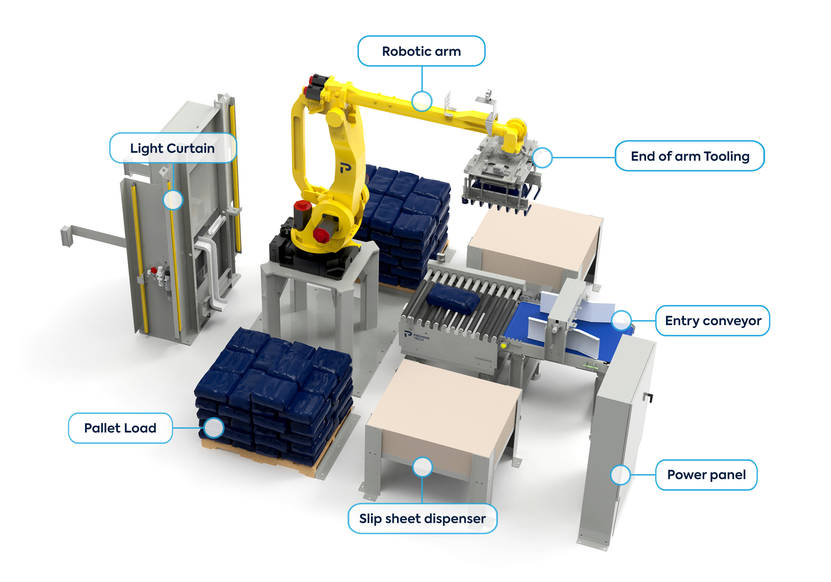
Top 10 Most Frequently Asked Palletizer Industry Questions Answered

Wooden Animal Figurines Plans Wooden Animals Animal Figurines Technical Drawing

Pdf Robotic Boreblending The Future Of In Situ Gas Turbine Repair

Pin On Robotics

Agile Robot Grippers With Topology Optimization Metal Am

Different End Effectors On The Market

Industrial Automation Courses To Take In 2020 Learn Robotics Learn Robotics Ladder Logic Automation

Pdf Identification Of Industrial Robot Frequency Response Function For Robotic Milling Using Operational Modal Analysis

Delta Parallel Robot Workspace And Dynamic Trajectory Tracking Of Delta Parallel Robot Semantic Scholar

Different End Effectors On The Market

Pdf Design Of A Robotic Arm With Gripper End Effector For Spot Welding Semantic Scholar

Pdf Telerobotically Controlled Magnetic Soft Continuum Robots For Neurovascular Interventions

Different End Effectors On The Market
Different End Effectors On The Market
![]()
Grippers And Accessories

Robotics End Of Arm Tooling Baumer International